Tillman Radmer & Fabian Hüger & Nico Schmidt
Uncertainty Estimation of Neural Networks
#1about 5 minutes
Understanding uncertainty through rare events in driving
Neural networks are more uncertain in rare situations like unusual vehicles on the road because these events are underrepresented in training data.
#2about 3 minutes
Differentiating aleatoric and epistemic uncertainty
Uncertainty is classified into two types: aleatoric (data noise, like blurry edges) and epistemic (model knowledge gaps), which can be reduced with more data.
#3about 3 minutes
Why classification scores are unreliable uncertainty metrics
Neural network confidence scores are often miscalibrated, showing overconfidence at high scores and underconfidence at low scores, making them poor predictors of true accuracy.
#4about 2 minutes
Using a simple alert system to predict model failure
The alert system approach uses a second, simpler model trained specifically to predict when the primary neural network is likely to fail on a given input.
#5about 15 minutes
Using Monte Carlo dropout and student networks for estimation
The Monte Carlo dropout method estimates uncertainty by sampling predictions, and its performance can be accelerated by training a smaller student network to mimic this behavior.
#6about 14 minutes
Applying uncertainty for active learning and corner case detection
An active learning framework uses uncertainty scores to intelligently select the most informative data (corner cases) from vehicle sensors for labeling and retraining models.
#7about 4 minutes
Challenges in uncertainty-based data selection strategies
Key challenges for active learning include determining the right amount of data to select, evaluating performance on corner cases, and avoiding model-specific data collection bias.
#8about 7 minutes
Addressing AI safety and insufficient generalization
Deep neural networks in autonomous systems pose safety risks due to insufficient generalization, unreliable confidence, and brittleness to unseen data conditions.
#9about 8 minutes
Building a safety argumentation framework for AI systems
A safety argumentation process involves identifying DNN-specific concerns, applying mitigation measures like uncertainty monitoring, and providing evidence through an iterative, model-driven development cycle.
Related jobs
Jobs that call for the skills explored in this talk.
Matching moments

03:37 MIN
Advancing automated driving with AI and neural networks
Software is the New Fuel, AI the New Horsepower - Pioneering New Paths at Mercedes-Benz
Unlock full access
Log in or set up an account to access this feature and more.
00:43 MIN
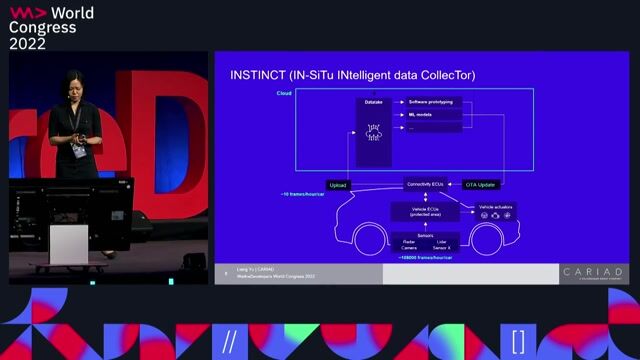
Finding the unknown unknowns in autonomous driving
Finding the unknown unknowns: intelligent data collection for autonomous driving development
Unlock full access
Log in or set up an account to access this feature and more.
02:51 MIN
Understanding the long-tail problem in driving scenarios
Finding the unknown unknowns: intelligent data collection for autonomous driving development
Unlock full access
Log in or set up an account to access this feature and more.
06:13 MIN
Skills and challenges of working with automotive AI
Developing an AI.SDK
Unlock full access
Log in or set up an account to access this feature and more.
02:59 MIN
Navigating the uncertainty of building AI products
The End of Software as we know it
Unlock full access
Log in or set up an account to access this feature and more.
05:03 MIN
Q&A on ethics, model deployment, and regional data
Finding the unknown unknowns: intelligent data collection for autonomous driving development
Unlock full access
Log in or set up an account to access this feature and more.
02:50 MIN
How INSTINCT software identifies valuable data
Finding the unknown unknowns: intelligent data collection for autonomous driving development
Unlock full access
Log in or set up an account to access this feature and more.
02:06 MIN
Applying machine learning in the automotive industry
Getting Started with Machine Learning
Unlock full access
Log in or set up an account to access this feature and more.
Featured Partners
Related Videos
 38:12
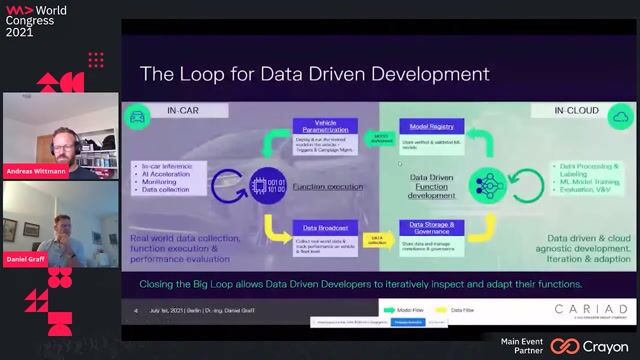
38:12Developing an AI.SDK
Daniel Graff & Andreas Wittmann
 19:24
19:24Finding the unknown unknowns: intelligent data collection for autonomous driving development
Liang Yu
 52:10
52:10Intelligent Data Selection for Continual Learning of AI Functions
Nico Schmidt
 48:01
48:01What non-automotive Machine Learning projects can learn from automotive Machine Learning projects
Jan Zawadzki
 42:18
42:18On the straight and narrow path - How to get cars to drive themselves using reinforcement learning and trajectory optimization
Francis Powlesland & Elena Kotljarova
 28:05
28:05A walkthrough on Responsible AI Frameworks and Case Studies
Toju Duke
 35:16
35:16How AI Models Get Smarter
Ankit Patel
 24:07
24:07WWC24 - Beyond the Hype: Real-World AI Strategies Panel
Mike Butcher, Jürgen Müller, Katrin Lehmann & Tobias Regenfuss
Related Articles
View all articles



From learning to earning
Jobs that call for the skills explored in this talk.


Nomitri
Berlin, Germany
DevOps
Gitlab
Docker
Ansible
Grafana
+6
Neural Concept
Lausanne, Switzerland
DevOps
Continuous Integration