Francis Powlesland & Elena Kotljarova
On the straight and narrow path - How to get cars to drive themselves using reinforcement learning and trajectory optimization
#1about 5 minutes
A novel approach to self-driving cars
This project uses reinforcement learning to enable a car to learn on-the-drive, unlike pre-trained models that rely on static data.
#2about 3 minutes
Setting a baseline with a human driver
A human driver completes three laps on the physical racetrack to establish a benchmark time for the AI to compete against.
#3about 5 minutes
Observing the AI learn across 1500 laps
The AI's driving behavior evolves from random and unstable after 15 laps to smooth and optimized after 150, showing diminishing returns by 1500 laps.
#4about 6 minutes
Understanding the core concepts of reinforcement learning
A recap of the demo's results leads into an explanation of reinforcement learning's core ideas like agents, environments, actions, and maximizing rewards.
#5about 5 minutes
Applying Q-learning with states, actions, and Q-tables
Q-learning uses a table of states and actions to store learned values, making it easy to inspect and update the agent's knowledge.
#6about 4 minutes
Key parameters for tuning the Q-learning algorithm
The algorithm's behavior is controlled by key parameters like the learning rate (alpha), discount factor, and the exploration factor (epsilon).
#7about 1 minute
The technical architecture of the race track demo
The demo integrates PS4 controllers, an Arduino, the Watson IoT platform, a Node.js backend, and a React.js frontend.
#8about 3 minutes
Real-world application with Thyssen Krupp
A collaboration with Thyssen Krupp applies these reinforcement learning concepts to a full-size vehicle to learn and adapt its driving style.
#9about 7 minutes
Q&A on data, constraints, and local optima
The speakers answer audience questions about the importance of data quality, how the car stays on the track, and how the algorithm avoids local optima.
Related jobs
Jobs that call for the skills explored in this talk.
Matching moments
03:46 MIN
Applying machine learning to automated driving and personalization
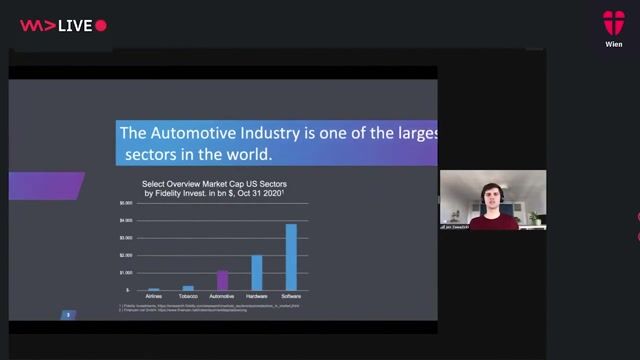
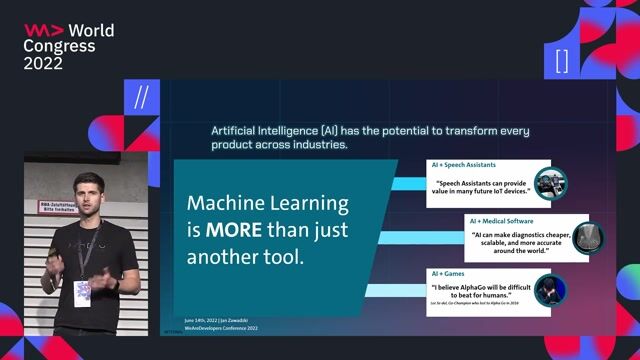
How Machine Learning is turning the Automotive Industry upside down
Unlock full access
Log in or set up an account to access this feature and more.

03:37 MIN
Advancing automated driving with AI and neural networks
Software is the New Fuel, AI the New Horsepower - Pioneering New Paths at Mercedes-Benz
Unlock full access
Log in or set up an account to access this feature and more.

03:11 MIN
The ADAS driver coach for racetrack performance
Software stack under and over the hood of the fastest accelerating car in the world
Unlock full access
Log in or set up an account to access this feature and more.

02:23 MIN
Using machine learning and swarm data for automated driving
Software defines the vehicle: Why customers and developers will love cars even more
Unlock full access
Log in or set up an account to access this feature and more.
08:33 MIN
Exploring real-world automotive use cases from Bosch
On developing smartphones on wheels
Unlock full access
Log in or set up an account to access this feature and more.
06:13 MIN
Skills and challenges of working with automotive AI
Developing an AI.SDK
Unlock full access
Log in or set up an account to access this feature and more.

02:16 MIN
The multidisciplinary future of automated driving development
Automated Driving - Why is it so hard to introduce
Unlock full access
Log in or set up an account to access this feature and more.

06:16 MIN
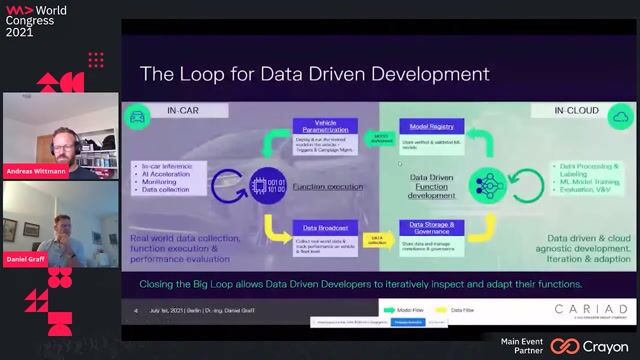
Building an AI-ready architecture for autonomous driving
What non-automotive Machine Learning projects can learn from automotive Machine Learning projects
Unlock full access
Log in or set up an account to access this feature and more.
Featured Partners
Related Videos
 38:12
38:12Developing an AI.SDK
Daniel Graff & Andreas Wittmann
 26:55
26:55How Machine Learning is turning the Automotive Industry upside down
Jan Zawadzki
 19:24
19:24Finding the unknown unknowns: intelligent data collection for autonomous driving development
Liang Yu
 48:01
48:01What non-automotive Machine Learning projects can learn from automotive Machine Learning projects
Jan Zawadzki
 31:23
31:23Automated Driving - Why is it so hard to introduce
Sayed Bouzouraa
 52:10
52:10Intelligent Data Selection for Continual Learning of AI Functions
Nico Schmidt
 24:07
24:07WWC24 - Beyond the Hype: Real-World AI Strategies Panel
Mike Butcher, Jürgen Müller, Katrin Lehmann & Tobias Regenfuss
 28:05
28:05A walkthrough on Responsible AI Frameworks and Case Studies
Toju Duke
Related Articles
View all articles



From learning to earning
Jobs that call for the skills explored in this talk.

Teoresi Group
Remote
Junior
DevOps
Docker
Kubernetes
Microservices
Neural Concept
Lausanne, Switzerland
DevOps
Continuous Integration
ARRK Product Development Group Ltd.
Remote
Matlab
PyTorch
Tensorflow
Data analysis
+2