Alexander Schwarz
How Robots Learn to be Robots
#1about 3 minutes
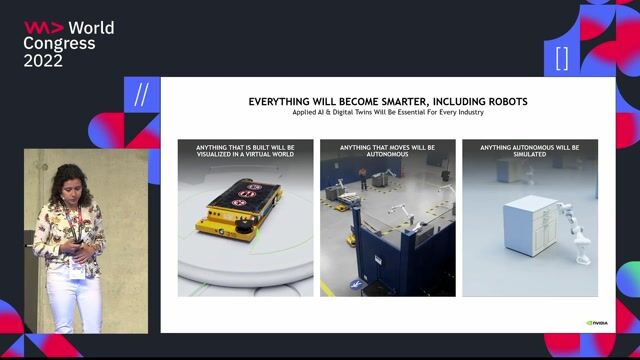
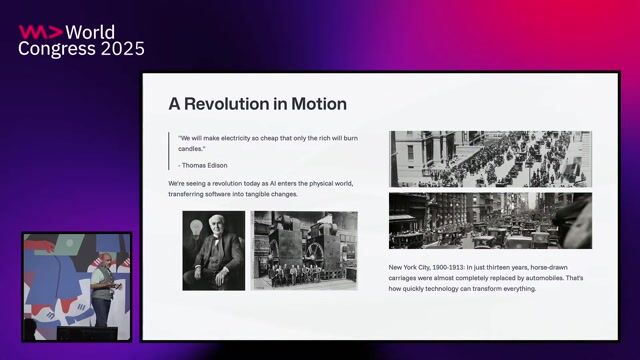
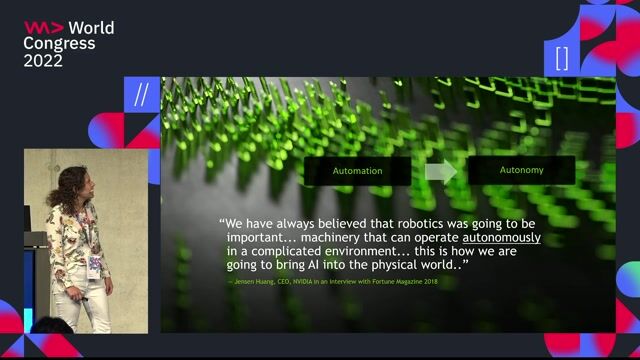
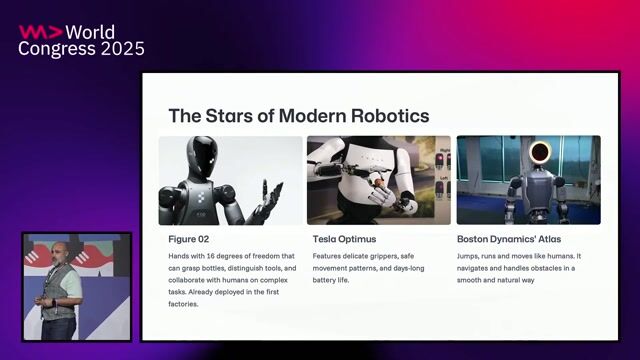
The evolution from digital agents to physical AI
Physical AI extends digital agentic systems into the physical world, enabling robots to understand and act based on sensory input and instructions.
#2about 4 minutes
The three-computer solution for robotics challenges
The high cost of data and physical testing is solved by a three-computer workflow using simulation for data generation, a separate system for training, and simulation again for validation.
#3about 3 minutes
Understanding reinforcement and imitation learning for robots
Robots learn skills through reinforcement learning by trial and error with rewards, or through imitation learning by mimicking expert demonstrations.
#4about 2 minutes
Building digital twins with Omniverse and Isaac Sim
NVIDIA Omniverse is a development platform based on OpenUSD for creating digital twins, with Isaac Sim providing a dedicated application for robot simulation.
#5about 2 minutes
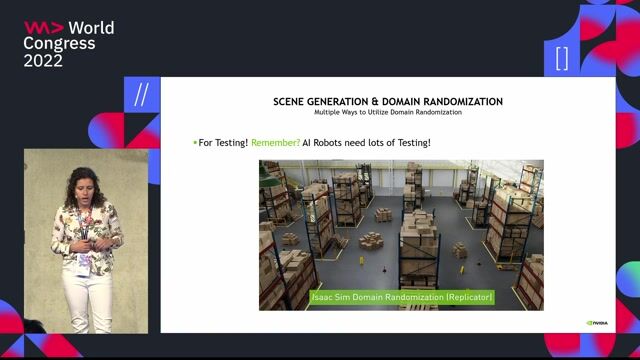
Scaling training data with simulated teleoperation
A small number of human demonstrations collected via teleoperation in Isaac Sim can be algorithmically scaled into a large, diverse, and photorealistic synthetic dataset.
#6about 3 minutes
Generating photorealistic data with Cosmos foundation models
Cosmos is a platform of world foundation models, including Cosmos Transfer, which uses control nets to transform basic simulation outputs into photorealistic videos.
#7about 3 minutes
Generating novel robot scenarios with Isaac GR00T Dreams
The Isaac GR00T Dreams workflow uses a post-trained Cosmos Predict model to generate new robot behaviors from a single image, which are then filtered and labeled to create training data.
#8about 2 minutes
A hybrid data strategy for robust foundation models
Robust robot foundation models like Isaac GR00T are trained by combining vast internet video data, high-quality human demonstrations, and large-scale synthetic data.
#9about 1 minute
Testing and deploying robots in large-scale simulations
Before real-world deployment, trained robot models can be rigorously tested at scale within digital twins of complex environments like factories using OpenUSD.
Related jobs
Jobs that call for the skills explored in this talk.
Matching moments
02:47 MIN
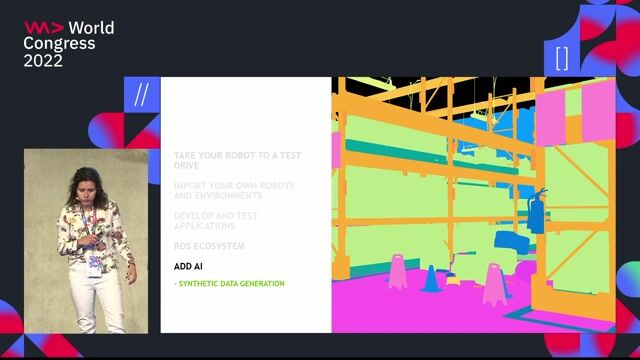
An overview of NVIDIA Omniverse and Isaac Sim
Enhancing AI-based Robotics with Simulation Workflows
Unlock full access
Log in or set up an account to access this feature and more.
02:50 MIN
Real-world examples of simulation-trained robots
Enhancing AI-based Robotics with Simulation Workflows
Unlock full access
Log in or set up an account to access this feature and more.
02:26 MIN
AI is moving from the screen to the physical world
Robots 2.0: When artificial intelligence meets steel
Unlock full access
Log in or set up an account to access this feature and more.
02:59 MIN
Core requirements for developing AI-powered robots
Enhancing AI-based Robotics with Simulation Workflows
Unlock full access
Log in or set up an account to access this feature and more.

03:06 MIN
Introducing the concept of an immersive AI copilot
Coding an Immersive Copilot using Unity / .NET and Azure OpenAI!
Unlock full access
Log in or set up an account to access this feature and more.
02:33 MIN
Using synthetic data generation for AI training
Enhancing AI-based Robotics with Simulation Workflows
Unlock full access
Log in or set up an account to access this feature and more.
02:07 MIN
Why robotic capabilities are advancing so rapidly
Robots 2.0: When artificial intelligence meets steel
Unlock full access
Log in or set up an account to access this feature and more.

09:45 MIN
Implementing an AI-in-the-loop continuous learning cycle
A solution to embed container technologies into automotive environments
Unlock full access
Log in or set up an account to access this feature and more.
Featured Partners
Related Videos
 30:57
30:57Enhancing AI-based Robotics with Simulation Workflows
Teresa Conceicao
 28:19
28:19Robots 2.0: When artificial intelligence meets steel
Thomas Tomow
 25:14
25:14The shadows of reasoning – new design paradigms for a gen AI world
Jonas Andrulis
 30:58
30:58From Code to Motion: Building an Autonomous Hat-Hunting Robot with Kubernetes & ML
Daniel Brintzinger
 29:34
29:34Robots are coming into the wild! Full-Stack Robotics Engineers, be ready!
Falk-Moritz Schaefer
 28:27
28:27AI & Ethics
PJ Hagerty
 35:16
35:16How AI Models Get Smarter
Ankit Patel
 29:54
29:54AI'll Be Back: Generative AI in Image, Video, and Audio Production
Fabian Pottbäcker, Thomas Endres & Martin Foertsch
Related Articles
View all articles



From learning to earning
Jobs that call for the skills explored in this talk.

Neura Robotics GmbH
Intermediate
Machine Learning
Jack & Jill\u002FExternal ATS
Machine Learning
Neural Concept
Lausanne, Switzerland
DevOps
Continuous Integration