Teresa Conceicao
Enhancing AI-based Robotics with Simulation Workflows
#1about 3 minutes
Understanding the limitations of pre-programmed robots
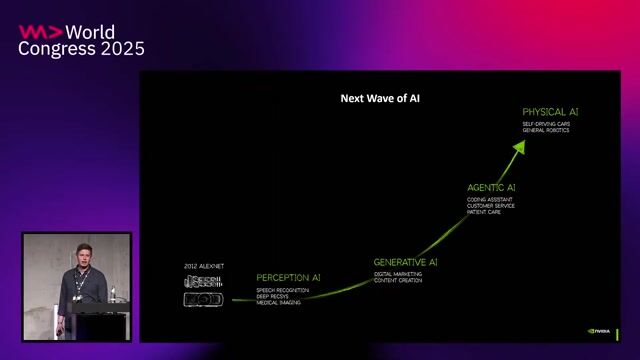
Pre-programmed robots often fail when environmental conditions change, highlighting the need for more adaptive AI-driven autonomy.
#2about 3 minutes
Core requirements for developing AI-powered robots
AI-based robots require massive amounts of diverse data, extensive parallel training, and rigorous testing, which are challenging to achieve in the real world.
#3about 3 minutes
An overview of NVIDIA Omniverse and Isaac Sim
NVIDIA Omniverse provides a platform for creating physically accurate virtual worlds, while Isaac Sim offers specialized tools for robotics simulation.
#4about 3 minutes
Getting started with your first robot in Isaac Sim
Learn the initial development steps by running a "Hello World" example, importing a robot model via the URDF importer, and inspecting its properties.
#5about 2 minutes
Building and collaborating on simulation environments
Leverage Omniverse's live-sync capabilities to collaborate on creating rich simulation environments by connecting to industry tools like Revit and Rhino.
#6about 4 minutes
Programming robot behavior with Python, OmniGraph, and ROS
Explore various methods for controlling robots, including direct Python APIs, the OmniGraph visual programming interface, and integration with the Robot Operating System (ROS).
#7about 3 minutes
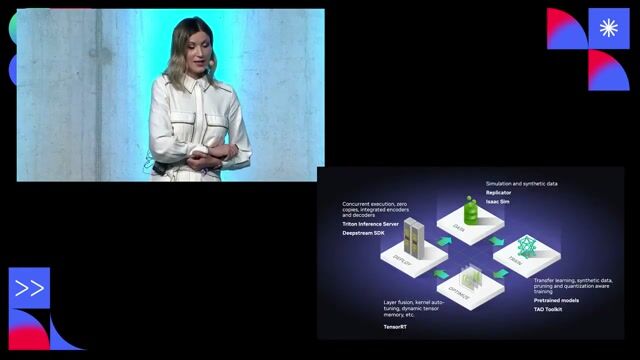
Using synthetic data generation for AI training
Overcome the challenges of real-world data collection by using simulation to generate perfectly labeled, diverse synthetic data for training perception models.
#8about 5 minutes
Closing the sim-to-real gap with domain randomization
Mitigate the appearance and content gaps between simulation and reality by using domain randomization to create more robust and generalizable AI models.
#9about 3 minutes
Real-world examples of simulation-trained robots
See how partners like Fraunhofer, Festo, and ETH Zurich use Isaac Sim to develop, train, and test advanced robots for logistics and collaboration.
#10about 2 minutes
Resources for getting started and final Q&A
Find resources like documentation, developer forums, and conference talks to learn more, followed by a Q&A on procedural versus handmade data.
Related jobs
Jobs that call for the skills explored in this talk.
Matching moments

02:25 MIN
Building digital twins with Omniverse and Isaac Sim
How Robots Learn to be Robots
Unlock full access
Log in or set up an account to access this feature and more.

03:44 MIN
The three-computer solution for robotics challenges
How Robots Learn to be Robots
Unlock full access
Log in or set up an account to access this feature and more.

09:45 MIN
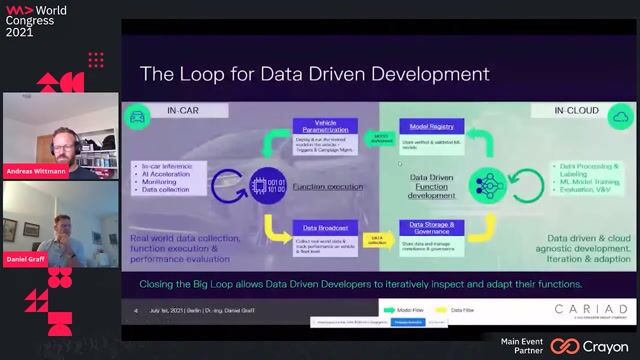
Implementing an AI-in-the-loop continuous learning cycle
A solution to embed container technologies into automotive environments
Unlock full access
Log in or set up an account to access this feature and more.
02:23 MIN
Matching edge AI challenges with NVIDIA's solutions
Trends, Challenges and Best Practices for AI at the Edge
Unlock full access
Log in or set up an account to access this feature and more.

01:27 MIN
Testing and deploying robots in large-scale simulations
How Robots Learn to be Robots
Unlock full access
Log in or set up an account to access this feature and more.

04:28 MIN
A software developer's perspective on building AI prototypes
Bringing the power of AI to your application.
Unlock full access
Log in or set up an account to access this feature and more.

02:21 MIN
Scaling training data with simulated teleoperation
How Robots Learn to be Robots
Unlock full access
Log in or set up an account to access this feature and more.

03:06 MIN
Introducing the concept of an immersive AI copilot
Coding an Immersive Copilot using Unity / .NET and Azure OpenAI!
Unlock full access
Log in or set up an account to access this feature and more.
Featured Partners
Related Videos
 24:48
24:48How Robots Learn to be Robots
Alexander Schwarz
 29:34
29:34Robots are coming into the wild! Full-Stack Robotics Engineers, be ready!
Falk-Moritz Schaefer
 38:12
38:12Developing an AI.SDK
Daniel Graff & Andreas Wittmann
 52:10
52:10Intelligent Data Selection for Continual Learning of AI Functions
Nico Schmidt
 1:18:27
1:18:27How to develop an autonomous car end-to-end: Robotic Drive and the mobility revolution
Ulrich Wurstbauer & Mohamed Nassar
 19:24
19:24Finding the unknown unknowns: intelligent data collection for autonomous driving development
Liang Yu
 27:26
27:26Staying Safe in the AI Future
Cassie Kozyrkov
 22:07
22:07WWC24 - Ankit Patel - Unlocking the Future Breakthrough Application Performance and Capabilities with NVIDIA
Ankit Patel
Related Articles
View all articles



From learning to earning
Jobs that call for the skills explored in this talk.


Neural Concept
Lausanne, Switzerland
DevOps
Continuous Integration
Nomitri
Berlin, Germany
DevOps
Gitlab
Docker
Ansible
Grafana
+6