Daniel Brintzinger
From Code to Motion: Building an Autonomous Hat-Hunting Robot with Kubernetes & ML
#1about 3 minutes
Understanding the challenges of edge computing deployments
DevOps principles can be extended from the data center to manage workloads on disconnected or intermittently connected edge devices.
#2about 2 minutes
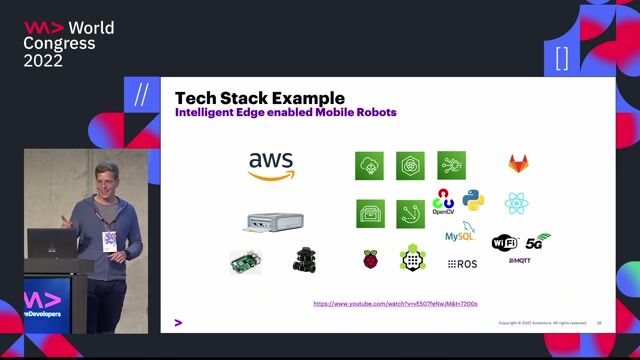
Introducing the robot's hardware and software stack
The robot is built on a Raspberry Pi running MicroShift, a lightweight Kubernetes distribution, and exposes a simple Flask REST API for motion control.
#3about 4 minutes
Designing the end-to-end system architecture
The system uses a central OpenShift cluster for development and model training, with Skupper for secure communication and ArgoCD for GitOps-based deployment to the robot.
#4about 7 minutes
Training an object detection model with OpenShift AI
A JupyterLab workbench is used to define and run an Elyra pipeline that trains a YOLOv5 model on the Open Images dataset to recognize fedora hats.
#5about 4 minutes
Deploying the trained model as an inference service
The trained ONNX model is deployed as a scalable and secure REST API endpoint using the model serving feature in OpenShift AI.
#6about 7 minutes
Developing the robot control application in a web IDE
A Python Flask application is developed using a web-based IDE (Eclipse Che) with a devfile to manage the workspace and connect to the inference service.
#7about 2 minutes
Live demonstration of the autonomous hat-hunting robot
The robot successfully uses its camera and the ML model to detect a red hat, calculate its position, and navigate towards it in real-time.
#8about 1 minute
Managing edge deployments with GitOps using ArgoCD
ArgoCD manages the robot as a remote Kubernetes cluster, enabling automated, Git-driven rollouts of new application and model versions to the edge device.
Related jobs
Jobs that call for the skills explored in this talk.
Matching moments
10:52 MIN
Deploying a RAG-enabled chatbot on a Kubernetes platform
Supercharge your cloud-native applications with Generative AI
Unlock full access
Log in or set up an account to access this feature and more.
01:51 MIN
Using Red Hat tools across the AI development lifecycle
Developer Experience, Platform Engineering and AI powered Apps
Unlock full access
Log in or set up an account to access this feature and more.
03:03 MIN
Real-world robot deployments and their challenges
Robots 2.0: When artificial intelligence meets steel
Unlock full access
Log in or set up an account to access this feature and more.

03:08 MIN
Enabling hybrid AI with an open software stack
Bringing AI Everywhere
Unlock full access
Log in or set up an account to access this feature and more.
07:33 MIN
Building an intelligent robot from the ground up
Robots 2.0: When artificial intelligence meets steel
Unlock full access
Log in or set up an account to access this feature and more.

01:30 MIN
Overlooked challenges of running AI applications in production
Chatbots are going to destroy infrastructures and your cloud bills
Unlock full access
Log in or set up an account to access this feature and more.
02:34 MIN
Exploring the modern robotics technology stack
Robots are coming into the wild! Full-Stack Robotics Engineers, be ready!
Unlock full access
Log in or set up an account to access this feature and more.
03:02 MIN
The future of AI in DevOps and MLOps
Navigating the AI Wave in DevOps
Unlock full access
Log in or set up an account to access this feature and more.
Featured Partners
Related Videos
 17:34
17:34From Factory Floor to Kubernetes Core: Building an Edge Platform One Step at a Time
Dean Oren & Stefan Belsch
 28:19
28:19Robots 2.0: When artificial intelligence meets steel
Thomas Tomow
 31:38
31:38Developer Experience, Platform Engineering and AI powered Apps
Ignacio Riesgo & Natale Vinto
 19:01
19:01Simplifying edge app delivery: one workflow, thousands of devices
Christian Koep
 29:34
29:34Robots are coming into the wild! Full-Stack Robotics Engineers, be ready!
Falk-Moritz Schaefer
 24:48
24:48How Robots Learn to be Robots
Alexander Schwarz
 30:48
30:48One AI API to Power Them All
Roberto Carratalá
 48:54
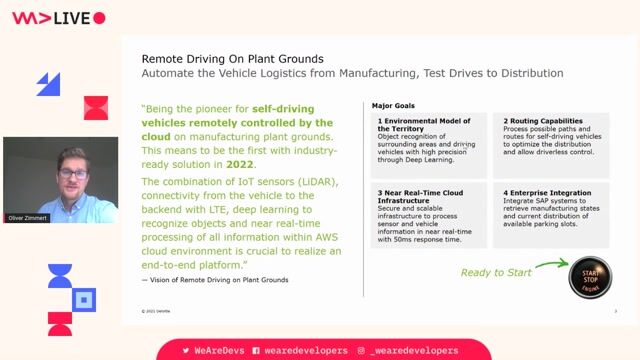
48:54Remote Driving on Plant Grounds with State-of-the-Art Cloud Technologies
Oliver Zimmert
Related Articles
View all articles
.gif?w=240&auto=compress,format)


From learning to earning
Jobs that call for the skills explored in this talk.

SYSKRON GmbH
Regensburg, Germany
Intermediate
Senior
.NET
Python
Kubernetes


autonomous-teaming
Munich, Germany
Remote
GIT
Linux
PyTorch
Machine Learning